G1
Revision History
Revision |
Date (DD/MM/YYYY) |
Author |
Changes |
|---|---|---|---|
1 |
22/4/2025 |
Kang Wei |
Initial release |
1. Overview
The G1 is a humanoid robot that stands 130 cm tall and weighs 35 kg. It comes equipped with a LIVOX MID-360 LiDAR and an Intel RealSense D435i depth camera.
2. Specifications
2.1 Technical Specifications
Model |
G1 |
G1-EDU |
|---|---|---|
Height, Width and Thickness (Stand) |
1320x450x200mm |
1320x450x200mm |
Height, Width and Thickness (Fold) |
690x450x300mm |
690x450x300mm |
Weight (With Battery) |
About 35kg |
About 35kg |
Total Degrees of Freedom (Joint Freedom) |
23 |
23~43 |
Single Leg Degrees of Freedom |
6 |
6 |
Waist Degrees of Freedom |
1 |
1+ (Optional 2 additional waist degrees of freedom) |
Single Arm Degrees of Freedom |
5 |
5 |
Single Hand Degrees of Freedom |
/ |
7 (Optional Force control of three-fingered hand) + 2 (Optional 2 additional wrist degrees of freedom) |
Joint Output Bearing |
Industrial grade crossed roller bearings (high precision, high load capacity) |
Industrial grade crossed roller bearings (high precision, high load capacity) |
Joint Motor |
Low inertia high-speed internal rotor PMSM (better response speed and heat dissipation) |
Low inertia high-speed internal rotor PMSM (better response speed and heat dissipation) |
Maximum Torque of Knee Joint [1] |
90N.m |
120N.m |
Arm Maximum Load [2] |
About 2Kg |
About 3Kg |
Calf + Thigh Length |
0.6M |
0.6M |
Arm Span |
About 0.45M |
About 0.45M |
Extra Large Joint Movement Space |
Waist joint: Z±155°
Knee joint: 0~165°
Hip joint: P±154°, R-30~+170°, Y±158°
|
Waist joint: Z±155°, X±45°, Y±30°
Knee joint: 0~165°
Hip joint: P±154°, R-30~+170°, Y±158°
Wrist joint: P±92.5°, Y±92.5°
|
Full Joint Hollow Electrical Routing |
YES |
YES |
Joint Encode |
Dual encoder |
Dual encoder |
Cooling System |
Local air cooling |
Local air cooling |
Power Supply |
13 string lithium battery |
13 string lithium battery |
Basic Computing Power |
8-core high-performance CPU |
8-core high-performance CPU |
Sensing Sensor |
Depth Camera + 3D LiDAR |
Depth Camera + 3D LiDAR |
4 Microphone Array |
YES |
YES |
5W Speaker |
YES |
YES |
WiFi 6, Bluetooth 5.2 |
YES |
YES |
High Computing Power Module |
/ |
NVIDIA Jetson Orin |
Smart Battery (Quick Release) |
9000mAh |
9000mAh |
Charger |
54V 5A |
54V 5A |
Manual Controller |
YES |
YES |
Battery Life |
About 2h |
About 2h |
Upgraded Intelligent OTA |
YES |
YES |
Secondary Development [3] |
/ |
YES |
2.2 Electrical Interfaces
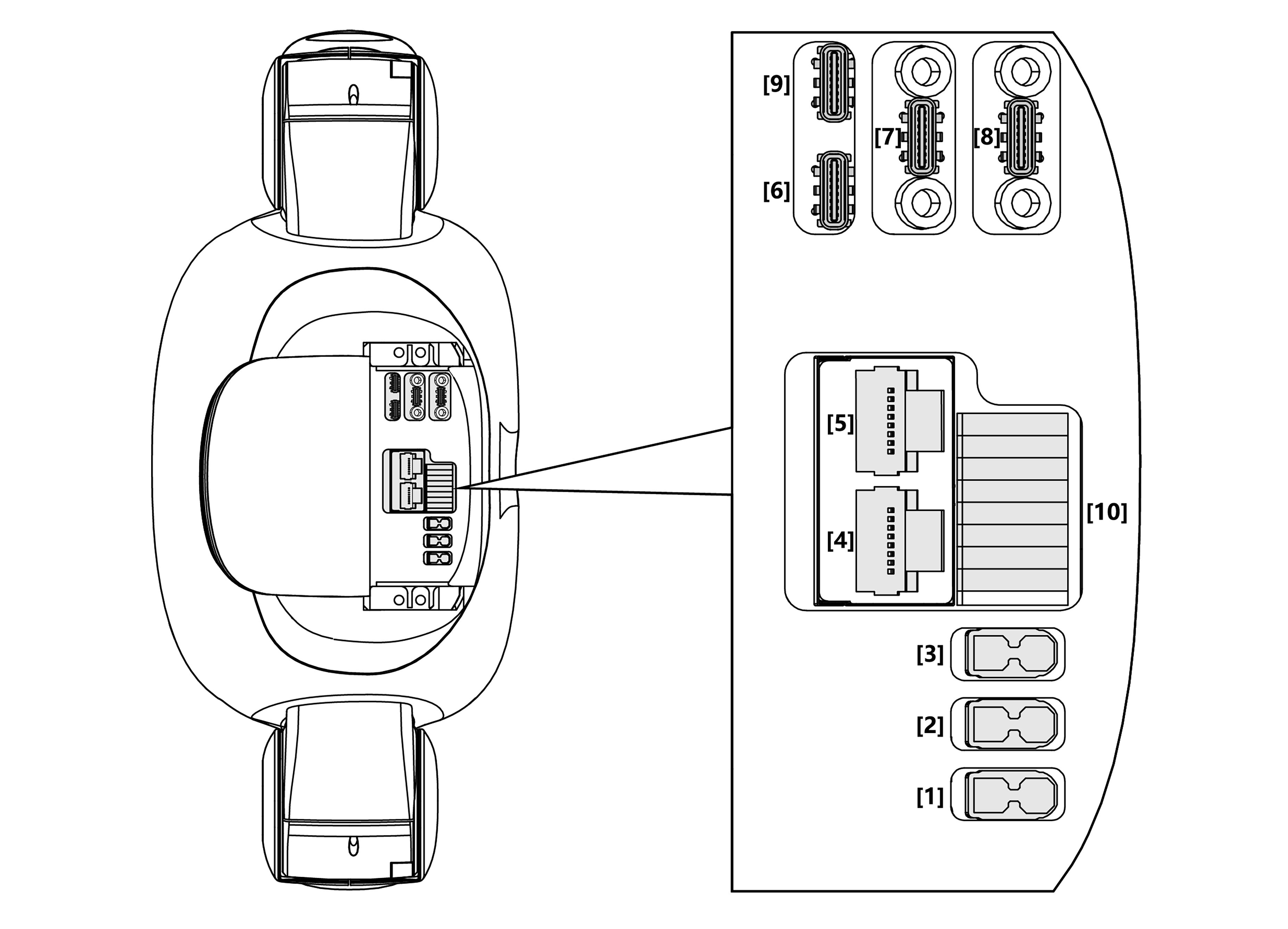
No. |
Connector Name |
Interface Description for short |
Interface specification |
|---|---|---|---|
1 |
XT30UPB-F |
VBAT |
58V/5A Battery power output (directly connected to battery power here) |
2 |
XT30UPB-F |
24V |
24V/5A power output |
3 |
XT30UPB-F |
12V |
12V/5A power output |
4 |
RJ45 |
1000 BASE-T |
GbE (gigabit Ethernet) |
5 |
RJ45 |
1000 BASE-T |
GbE (gigabit Ethernet) |
6 |
Type-C |
Type-C |
Support USB3.0 host, 5V/1.5A power output |
7 |
Type-C |
Type-C |
Support USB3.0 host, 5V/1.5A power output |
8 |
Type-C |
Type-C |
Support USB3.0 host, 5V/1.5A power output |
9 |
Type-C |
Alt Mode Type-C |
Supports USB3.2 host and DP1.4 |
10 |
5577 |
I/O OUT |
12V: 12V/3A power output See the following table for GPIO details |
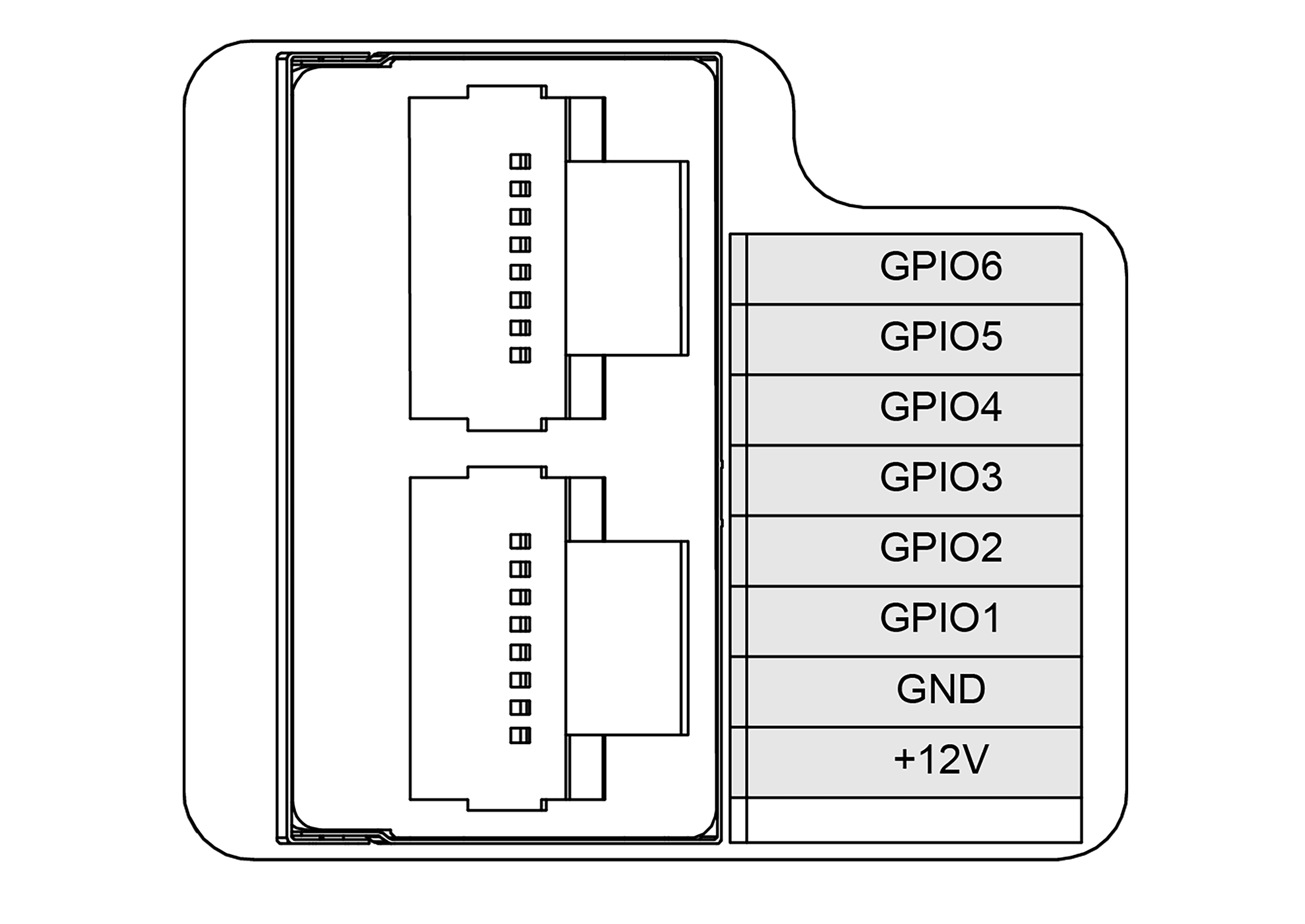
GPIO Number |
NX Pin Number |
Multiplexing Relationship |
Pin name of the debugfs file system |
|---|---|---|---|
GPIO1 |
203 |
UART1_TXD |
GPIO3_PR.02 |
GPIO2 |
205 |
UART1_RXD |
GPIO3_PR.03 |
GPIO3 |
232 |
I2C2_SCL |
GPIO3_PI.03 |
GPIO4 |
234 |
I2C2_SDA |
GPIO3_PI.04 |
GPIO5 |
128 |
GPIO |
GPIO3_PCC.02 |
GPIO6 |
130 |
GPIO |
GPIO3_PCC.03 |
Note
There are many ways to operate NVIDIA GPIO, refer to this link for the definition.
2.3 On-board Computer
G1 Edu has 2 onboard computers:
Operation & Control computing unit (Not accessible to public)
IP: 192.168.123.161
User development computing unit
IP: 192.168.123.164
Username: unitree
Password: Unitree0408
Parameter |
Development Computing Unit |
|---|---|
Model |
Jetson Orin NX |
CPU |
Arm® Cortex®-A78AE |
Number of cores |
8 |
Number of threads |
8 |
Max largest rate |
2 GHz |
Graphic memory |
16G |
Memory |
16G |
Cache |
2MB L2 + 4MB L3 |
Storage |
2T |
Intel® Image Processing Unit |
No |
GPU |
1024 NVIDIA Ampere architecture GPUs with 32 Tensor cores |
Maximum dynamic frequency of graphics card |
918 MHz |
Gaussian and Neuro Accelerator |
3.0 |
Intel® Deep Learning Promotion |
Yes |
Intel® Adaptix™ Technology |
Yes |
Intel® Hyperthreading Technology |
Yes |
Instructions set |
64bit |
OpenGL |
4.6 |
OpenCL |
3.0 |
DirectX |
12.1 |
3. Resources
Basic Guides
G1 Manual: Unitree
Training Slides: G1 Basic Training
Development
SDK Support: unitree_sdk2
ROS2 Support: unitree_ros2