A1 Robot Dog
Revision History
Revision |
Date (DD/MM/YYYY) |
Author |
Changes |
|---|---|---|---|
1 |
14/11/2022 |
Kee Jin |
Initial release |
1. Overview
The A1 robot dog is a 12 DOF, quadruped robot.
2. Specifications
Dimensions |
500mm x 300mm x 400mm |
Maximum traversal tilt |
22 degrees |
Maximum stair-climbing height |
12cm |
Maximum Speed |
3.3m/s |
Charging Time |
45min |
Weight |
12kg |
Rated Load |
5kg |
Motor |
12 x Servo Geared motors (9.1 : 1 reduction ratio) |
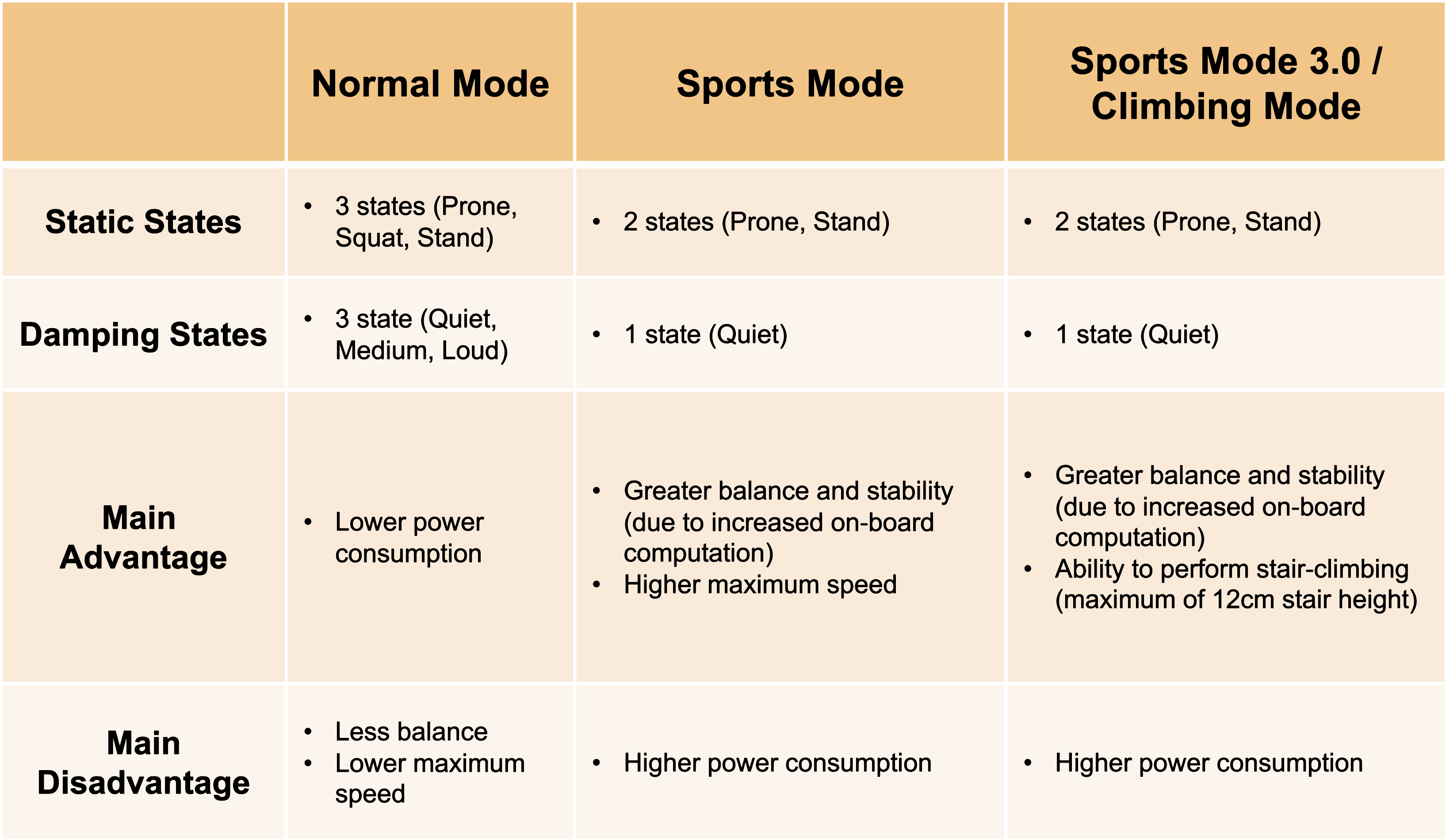
3. Summary of Modes
The following table summarises the 3 possible modes available in the A1 robot dog. For more details and complete state diagrams, please refer to our user guide: Getting Started with A1.
4. General Notes
When conducting experiments with the A1 that may impact its stability, the emergency stop and leash provided should be used where necessary.

The A1 should be powered off and its battery should be replaced whenever there is only 1/4 of the battery LED indicators left lit and blinking. This indicates that the battery level is low (0-25%).
Before powering off the A1, be sure to bring it down to the damped proning state first to prevent the robot from dropping down from a height. To do so, get the A1 to the “proning state” with “L2+A” and finally press “L2+B”.
5. Resources
User guide: Getting Started with A1
SDK: unitree_legged_sdk
ROS simulation package: unitree_ros
ROS controller package: unitree_ros_to_real
CAD File: A1 STEP file