Z1 Robot Arm
Revision History
Revision |
Date (DD/MM/YYYY) |
Author |
Changes |
|---|---|---|---|
1 |
17/01/2024 |
Kang Wei |
Initial release |
1. Overview
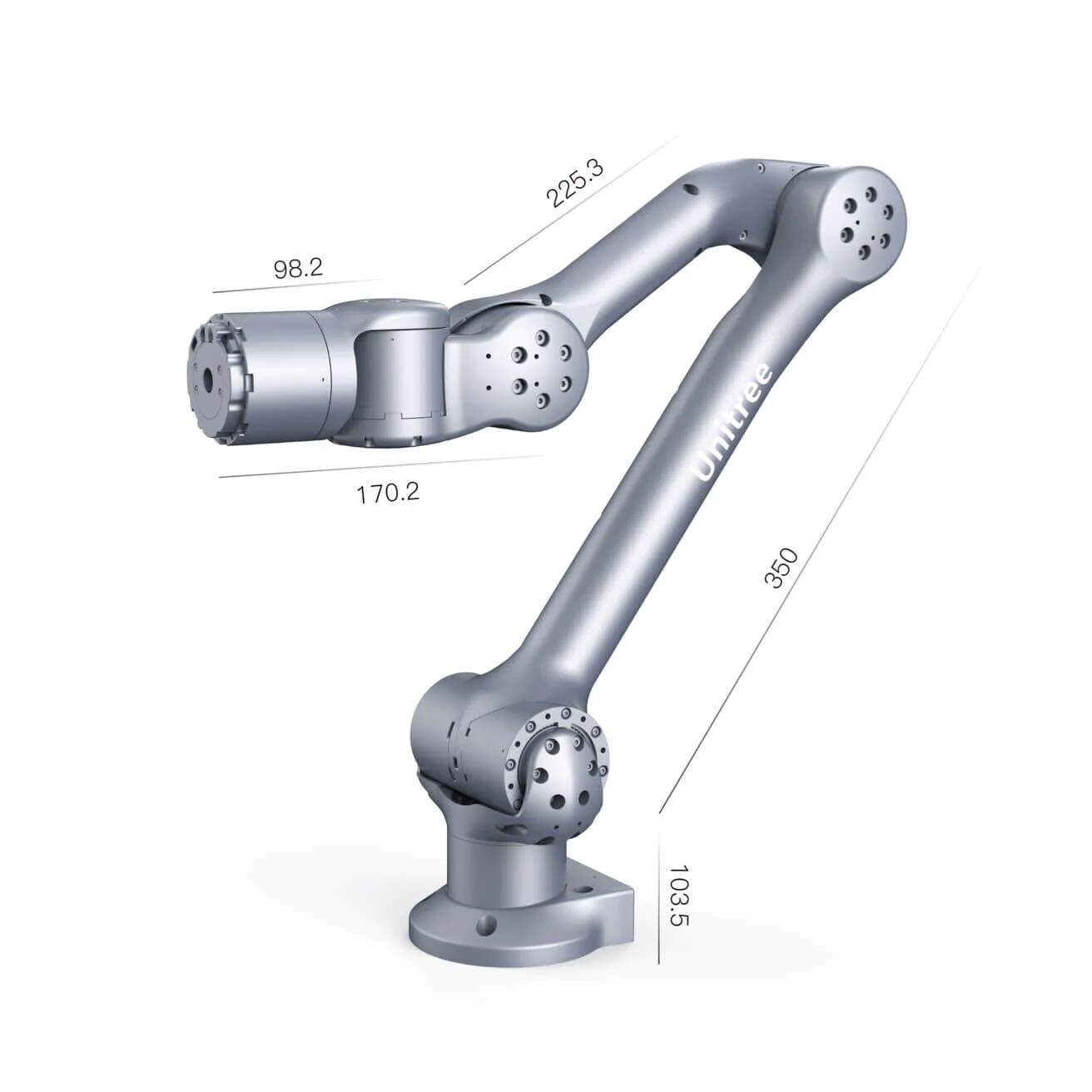
The Z1 robot arm is a compact and lightweight 6-DOF manipulator that can cooperate with the Aliengo or B1 robot and other mobile robots for diversified application scenarios.
2. Specifications
Degree of Freedom |
6 |
Reach |
740mm |
Repeatability [1] |
~0.1mm |
Power Supply |
Voltage 24V, Current > 20A |
Interface |
Ethernet |
User Operating System |
Ubuntu |
Power |
MAX 500W |
Force Feedback and Collision Detection |
Provided |
Control Interface [2] |
Position + Force Control |
[1] It depends on the actual test according to the use requirements (the test standards of manipulator vary greatly, and the accuracy varies greatly under different test conditions)
[2] Since the reduction ratio used by each joint is relatively low, the position control stiffness of the whole machine is low. If the control mode is not optimized, there will be large position control error and shaking when the manipulator moves.
Z1 Air |
Z1 Pro |
|
|---|---|---|
Weight |
4.3kg |
4.5kg |
Payload |
2.0kg |
≥3.0kg |
Joint |
Range |
Max Speed |
|---|---|---|
J1 |
±150° |
180°/s |
J2 |
0-180° |
180°/s |
J3 |
-165-0° |
180°/s |
J4 |
±80° |
180°/s |
J5 |
±85° |
180°/s |
J6 |
±160° |
180°/s |
3. End Effectors
Gripper

Dimensions |
139mm x 80mm x 68mm |
Weight |
700g - 750g |
Peak Grasp Force |
200N |
Peak Clamp Force (at tip of opening) |
150N |
Rated Load |
2kg |
Max Opening |
90° |
Opening/Closing Time |
0.5s |
Voltage |
24V |
Peak Power |
70W |
Communication Mode |
RS485 |
4. Resources
Manual
Z1 Manual: Unitree
Development
Z1 Controller: z1_controller
Z1 SDK: z1_sdk
ROS Package: unitree_ros