Ranger Mini 2.0
1. Overview
The Ranger Mini 2.0 mobile robot is a four-wheel swerve-drive platform.

2. Resources
- Manual:
- C++ SDK: ugv_sdk
- ROS1 package: ranger_ros
- ROS2 package: ranger_ros2
- Firmware:
- CAD Model: Ranger Mini 2.0 STEP file
3. Steering Motor Calibration
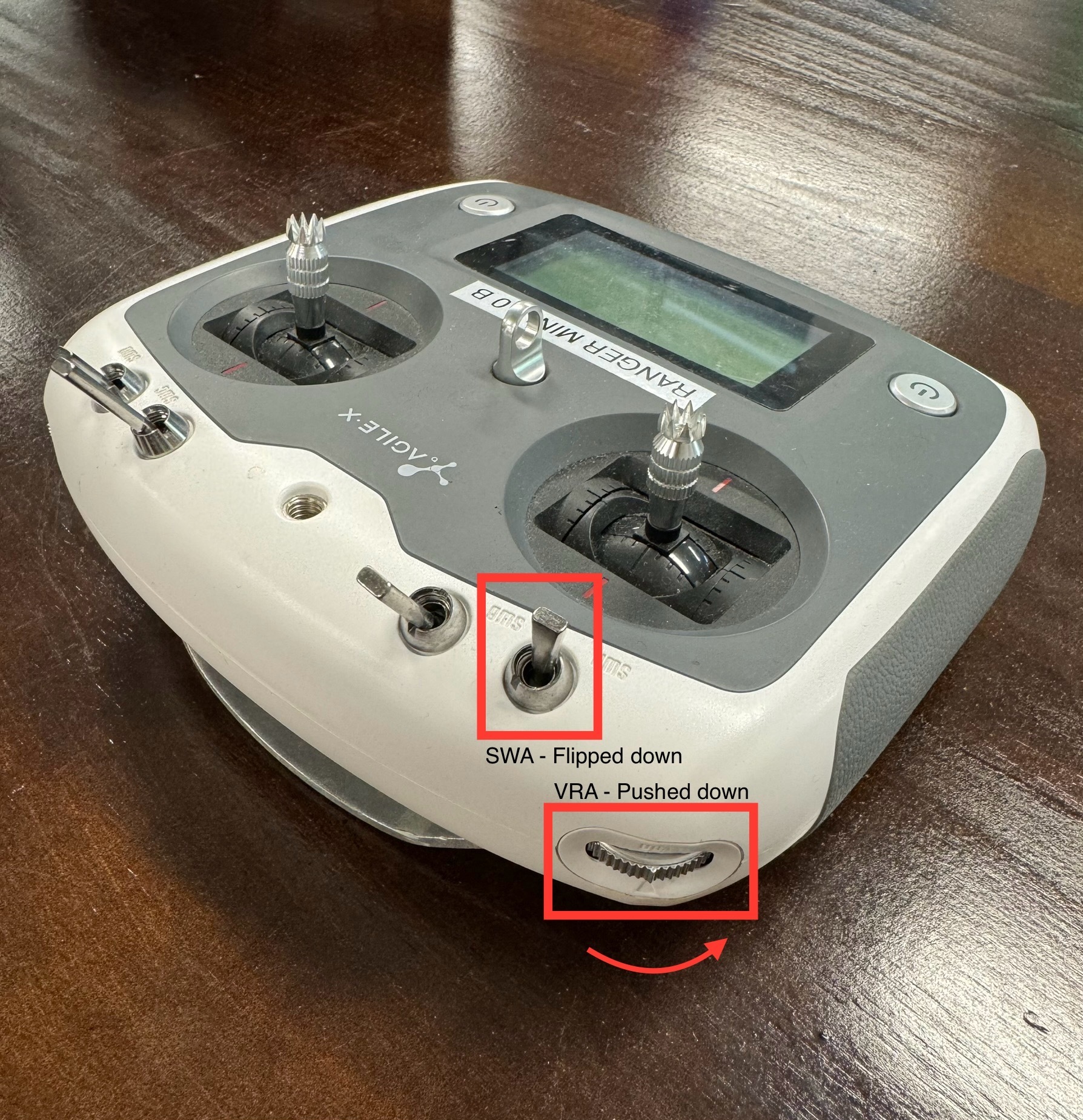
Autocalibration
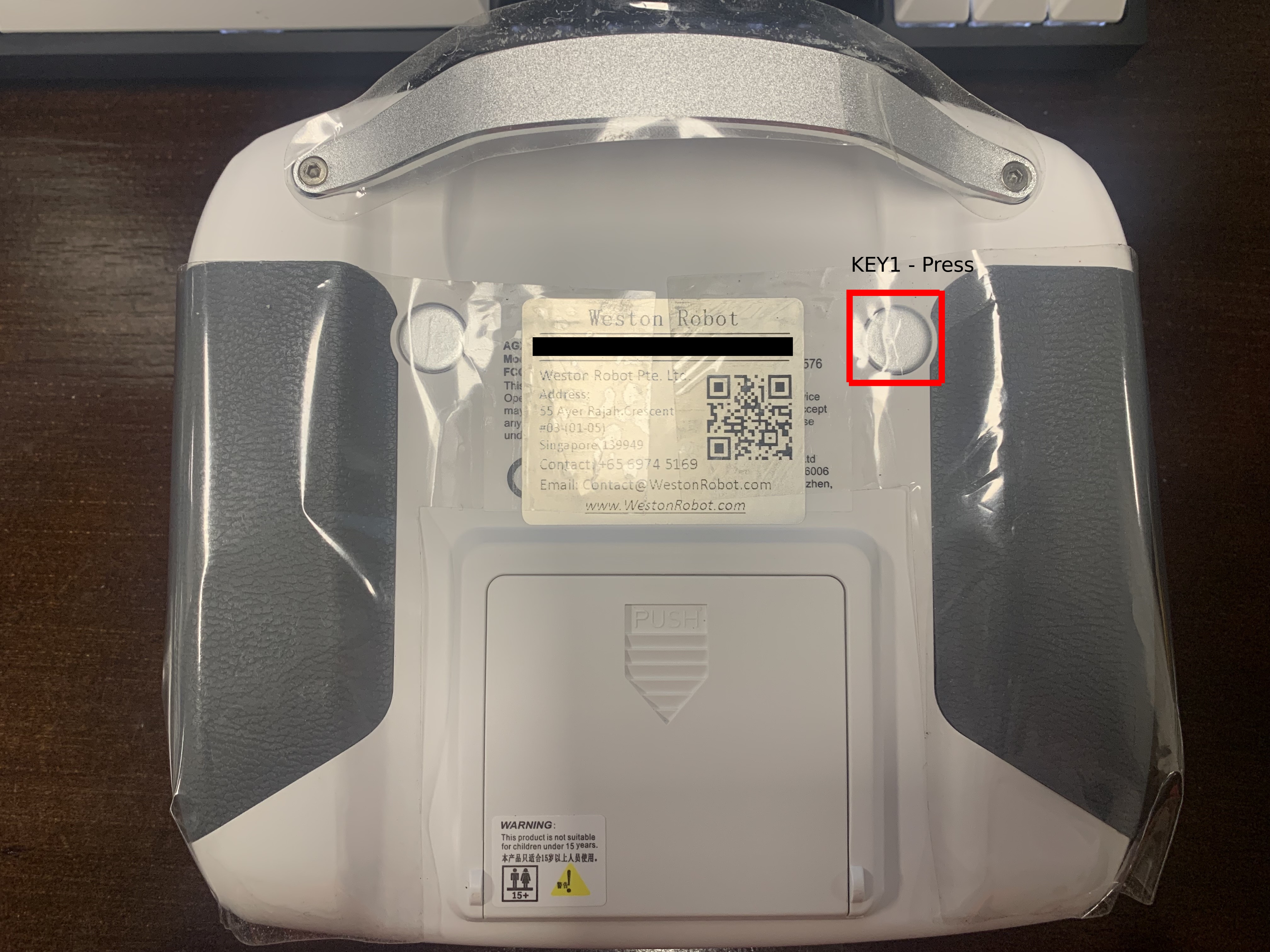
Turn on robot and controller. With SWA flipped to down position, and VRA pushed to bottommost position, press KEY1.
Manual Calibration
Turn off robot and controller. While robot is turned off, adjust the position of the steering wheels. Using a long straight object to help straighten the wheels is generally sufficient.

Turn on robot and controller. With SWA flipped to down position, and VRA pushed to topmost position, press KEY1.
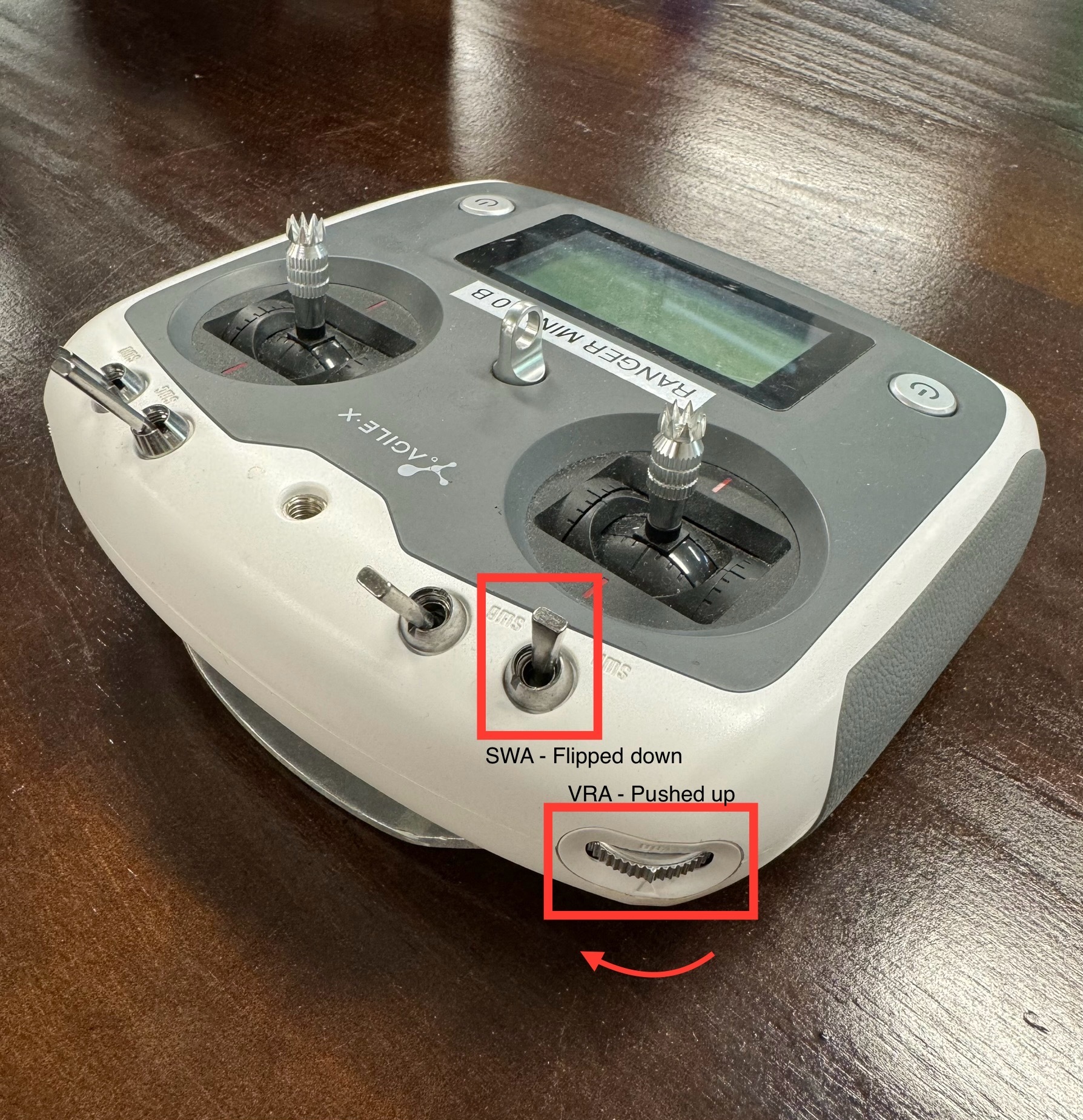
The controller display should flash a error code for 1-2 seconds then return to normal. Calibration is completed.