Ranger Mini V2.0
Revision History
Revision |
Date (DD/MM/YYYY) |
Author |
Changes |
|---|---|---|---|
1 |
04/05/2023 |
Kee Jin |
Initial release |
2 |
04/05/2023 |
Matthew |
Added steering wheel calibrations |
1. Overview
The Ranger Mini 2.0 mobile robot is an independent four-wheeled differential drive platform.
2. Specifications
Steering |
4-wheel steering |
Size |
738mm x 500mm x 338mm |
Minimum Ground Clearance |
107mm |
Operating Temperature |
-10 - 40 ℃ |
IP Rating |
IP54 |
Maximum Speed |
5.4km/h |
Maximum Angle of Tilt |
<15° (with loading) |
Charging Time |
1.5h |
Battery |
48V, 24AH |
User Power Supply |
48V, 15A (Max) |
Weight |
64.5kg |
Rated Load |
80kg |
Remote Control Range |
2.4G / 200m |
Motion Type |
Position Drift |
Orientation Drift |
Forward |
≤ 20cm |
≤ 3 degrees |
Side Slip |
≤ 30cm |
≤ 5 degrees |
Turn |
– |
≤ 2 degrees |
Note
The above data was obtained on a 10-meter standard testing ground in the laboratory. Actual data may vary due to on-site environmental conditions and road conditions.
1. Steering Motor Calibration
Autocalibration
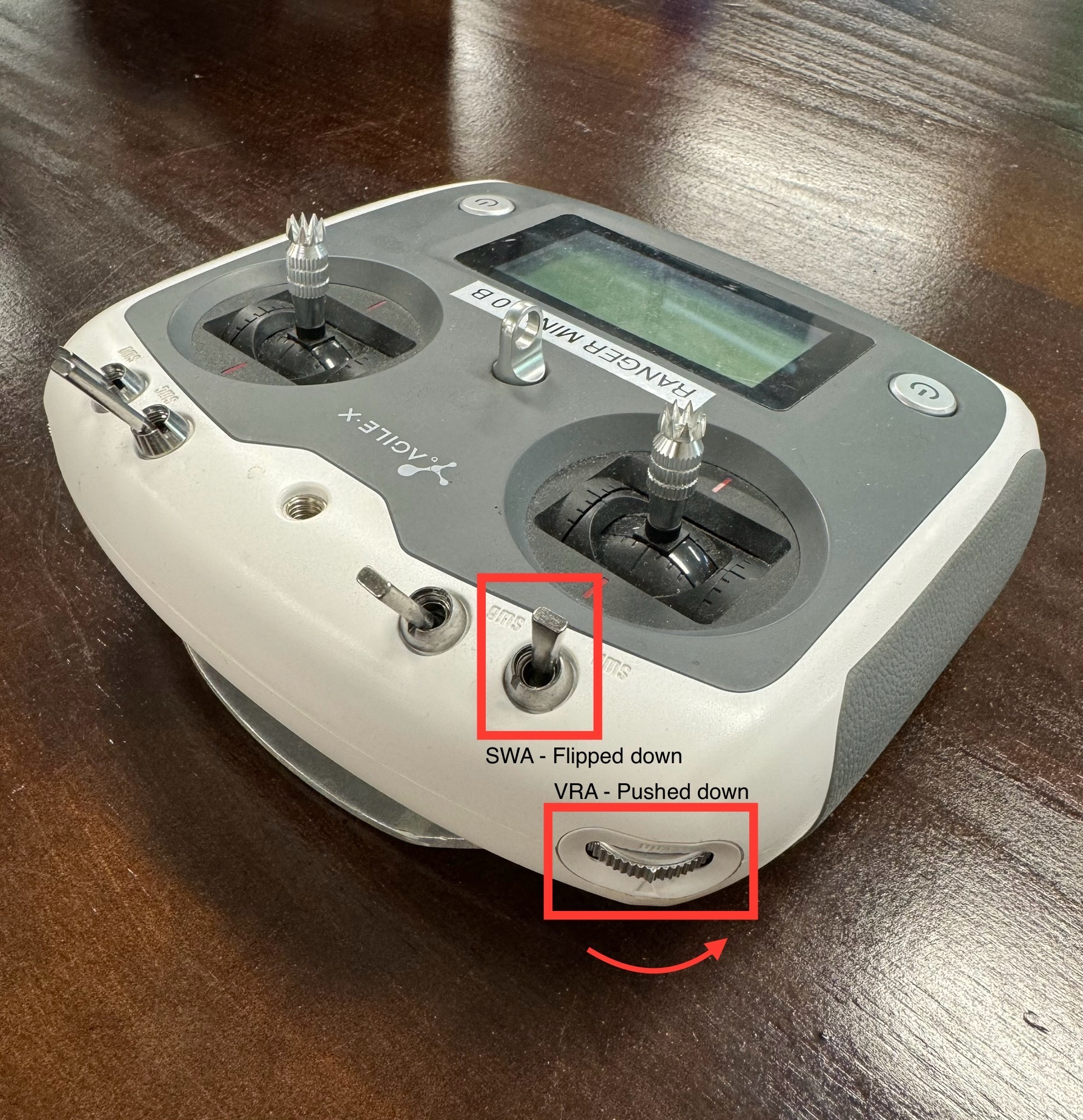
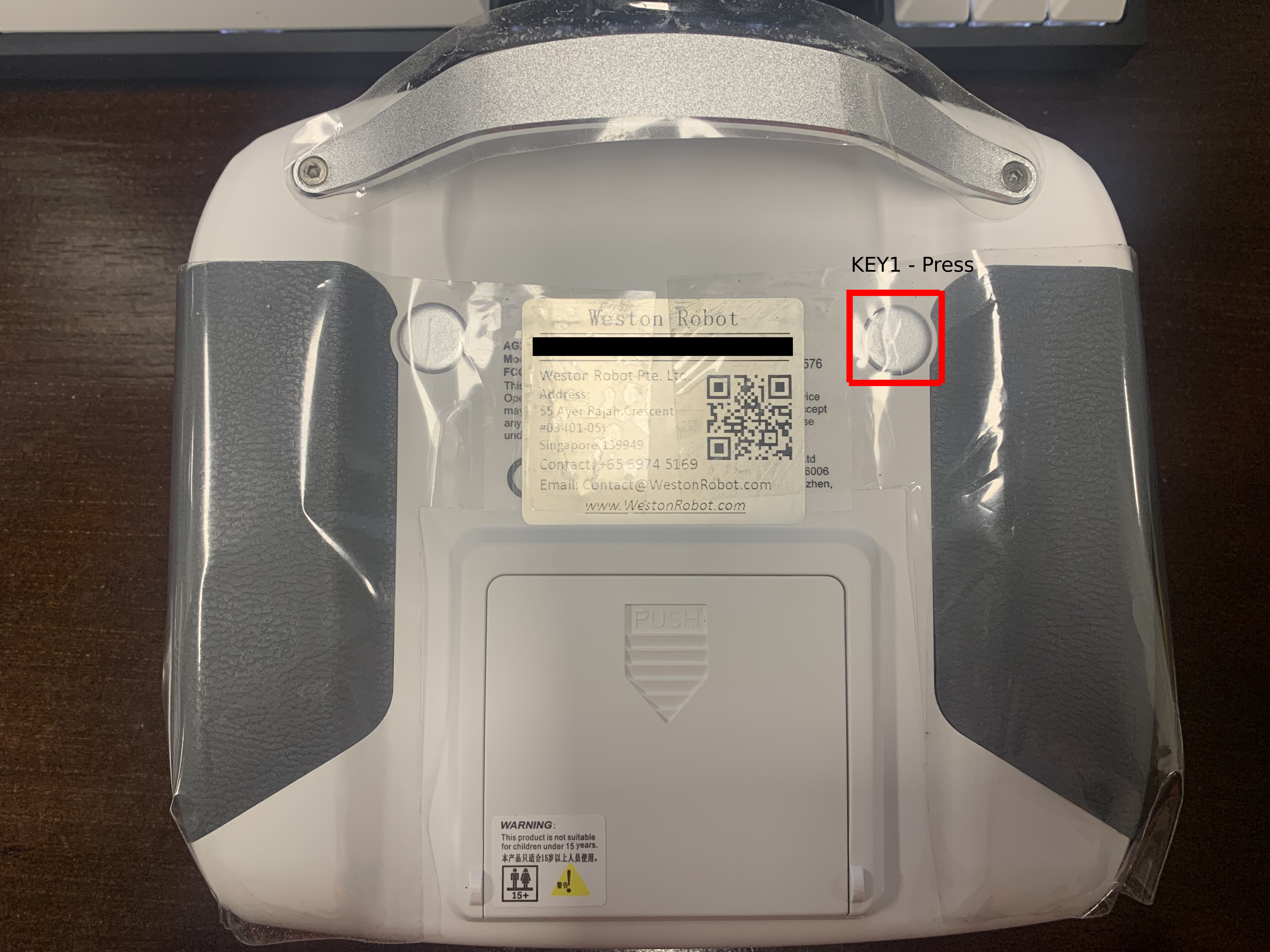
Turn on robot and controller. With SWA flipped to down position, and VRA pushed to bottommost position, press KEY1.
Manual Calibration
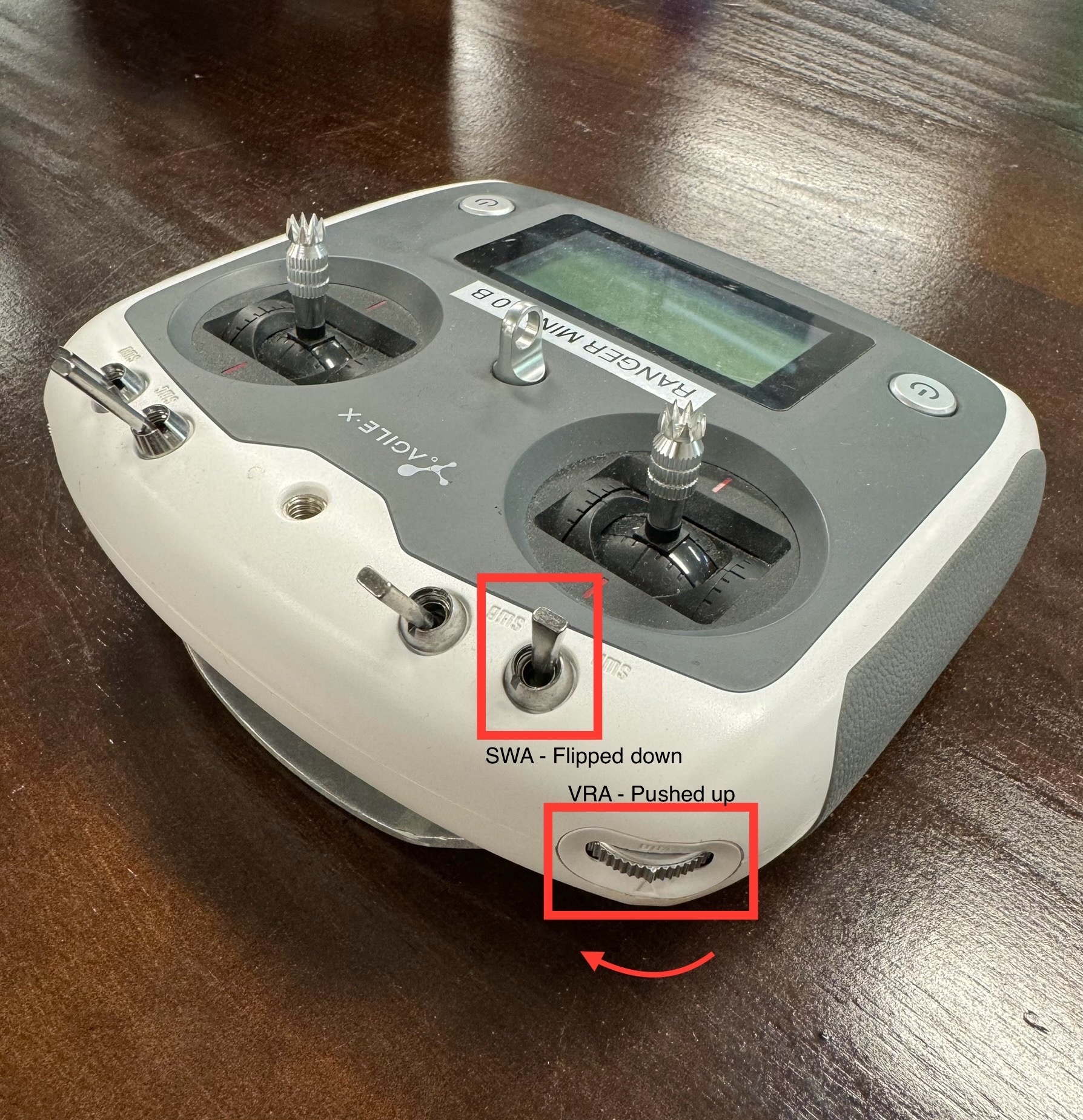
Turn off robot and controller. While robot is turned off, adjust the position of the steering wheels. Using a long straight object to help straighten the wheels is generally sufficient.

Turn on robot and controller. With SWA flipped to down position, and VRA pushed to topmost position, press KEY1.
The controller display should flash a error code for 1-2 seconds then return to normal. Calibration is completed.
4. Resources
Ranger Mini 2.0 Manual (EN): PDF
Ranger Mini 2.0 Manual (CN): PDF
C++ SDK: ugv_sdk
ROS1 package: ranger_ros
ROS2 package: ranger_ros2
CAD File: Ranger Mini 2.0 STEP file
Note
Please refer to the Robot Upgrade Guide for firmware upgrade instructions.