Tita
Revision History
Revision |
Date (DD/MM/YYYY) |
Author |
Changes |
|---|---|---|---|
1 |
13/02/2025 |
Kang Wei |
Initial release |
1. Getting Started
The Tita is a super agile & stylish two-wheeled-leg robot.
2. Specifications
Processor |
Jetson Orin NX 16G |
Research Programming API |
ROS 2 |
Normal Voltage |
43.2V |
AI Performance |
100 TOPs |
Tita Bridges |
3 on top |
Payload Weight |
Moving 10kg |
Max Jumping Height |
20cm |
DoF |
8 |
Max Speed |
3m/s |
Built-in Camera |
2 |
Built-in Speaker |
2 |
lnertial Sensor |
2 |
SPAD Sensor |
2 |
Ultrasonic Sensor |
1 |
Adjustable Output Power |
48V 5A |
Number of Battery |
2 |
3. Resources
Manual
Development
Development Manual: Link
ROS2: TITA-SDK-ROS2
Image
4. Q&A
- Q: How to activate e-stop?A: Refer to this video link
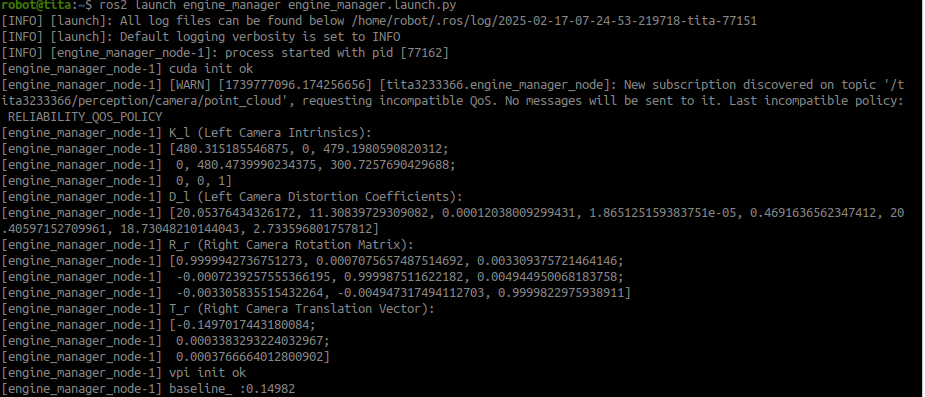
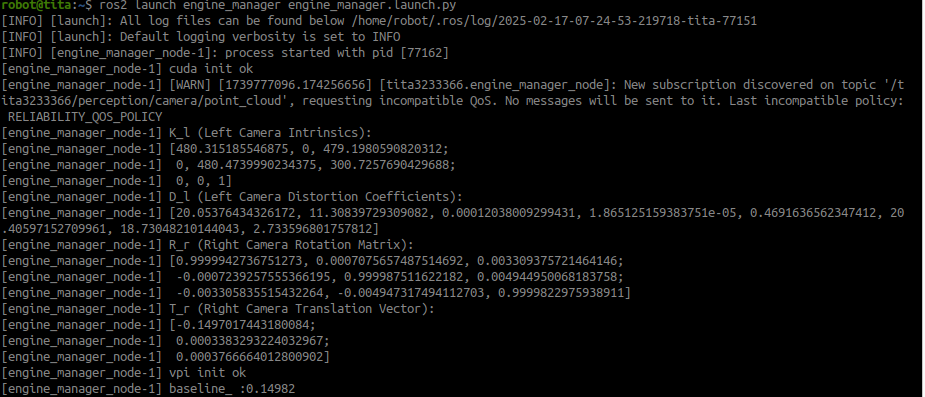
- Q: Why is camera point_cloud topic empty?A: Camera pointcloud node is not running. Run the following command:- $ source /opt/tita/ros2/setup.bash- $ ros2 launch engine_manager engine_manager.launch.py